3D Reconstruction using SLAM
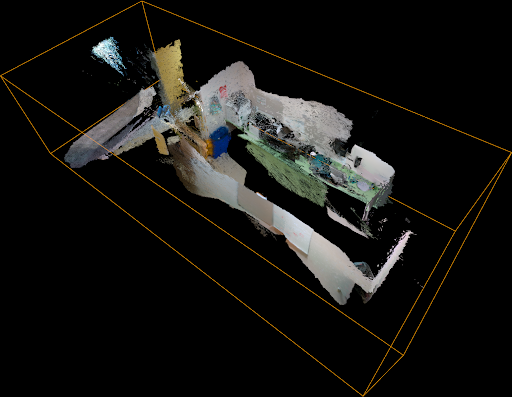
In a team of 3, developed an end-to-end VR application for 3D reconstruction and VR rendering of archaeological sites with an inertial RGBD camera using SLAM. Code available on GitHub.
- Primarily contributed to the development and interface of SLAM to obtain 6D pose trajectory.
- Implemented using C++, Python, ROS, Unity, and Docker, as part of the Embedded Systems course CSE237D.